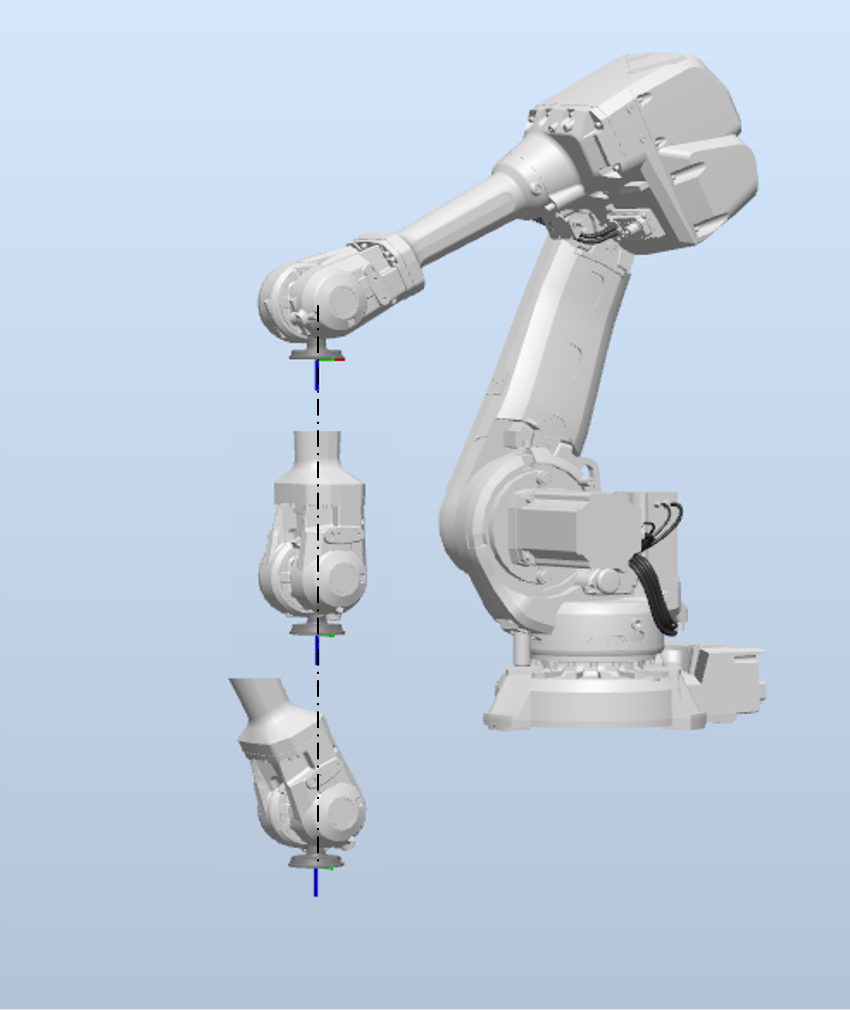
When the centerline of axis 4 and axis 6 are coming on one line, so when axis 5 reaches 0 degrees position, singularity can occur when moving the robot in a straight line.
Singularity means that the robot reaches an uncontrollable state and will give an error. This is a mathematical issue also occurring when the robot is moved in manual mode.
ABB has solved this issue when executing a RAPID program by means of the following instructions: