MODULE CalibData
PERS tooldata
Gripper:=[TRUE,[[0,0,69.7],[0,1,0,0]],[0.2,[0,0,20],[1,0,0,0],0,0,0.00014]];
PERS wobjdata
WO_Place:=[FALSE,TRUE,””,[[-76.957,318.869,-1141],[0.978,-0,0,-0.207]],[[0,0,0],[1,0,0,0]]];
PERS wobjdata
WO_Pick:=[FALSE,TRUE,””,[[-288.460,-156.174,-1141],[0.978,-0,0,-0.207]],[[0,0,0],[1,0,0,0]]];
ENDMODULE
MODULE Module1
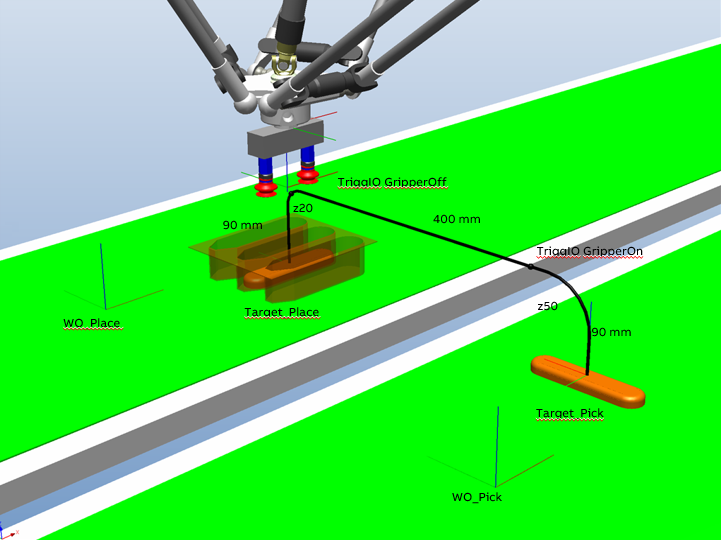
CONST robtarget Target_Place:=[[200,-60,11],[1,0,0,0],[0,0,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]];
CONST robtarget Target_Pick:=[[200,60,11],[0.7071067,0,0,0.7071067],[0,-1,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]];
CONST speeddata v10000:=[10000,1000,0,0];
PERS loaddata Product:=[0.01,[0,0,0.005],[1,0,0,0],0,0,0];
VAR triggdata GripperOn;
VAR triggdata GripperOff;
VAR stoppointdata PickTime:=[stoptime,FALSE,[0,0,0,0],0.03,0,””,0,0];
VAR stoppointdata PlaceTime:=[ stoptime,FALSE,[0,0,0,0],0.05,0,””,0,0];
PROC PickPlace()
MoveL RelTool (Target_Pick,0,0,90),v10000,z50,Gripper\WObj:=WO_Pick;
TriggL Target_Pick,v10000,GripperOn,z5\Inpos:=PickTime,Gripper\WObj:=WO_Pick;
Gripload Product;
MoveL RelTool (Target_Pick,0,0,90),v10000,z50,Gripper\WObj:=WO_Pick;
MoveL RelTool (Target_Place,0,0,90),v10000,z20,Gripper\WObj:=WO_Place;
TriggL Target_Place,v10000,GripperOff,z5\Inpos:=PlaceTime,Gripper\WObj:=WO_Place;
Gripload Load0;
MoveL RelTool (Target_Place,0,0,90),v10000,z20,Gripper\WObj:=WO_Place;
ENDPROC
PROC main()
TriggIO GripperOn,0.1\Time\DOp:=DOGripper,1;
TriggIO GripperOff,0.05\Time\DOp:=DOGripper,0;
FOR i FROM 1 TO 10 DO
PickPlace;
ENDFOR
ENDPROC
ENDMODULE