option: 1341-1
The purpose of ABB’s Integrated Vision system is to provide a robust and easy-to-use vision system for general purpose Vision Guided Robotics (VGR) applications.
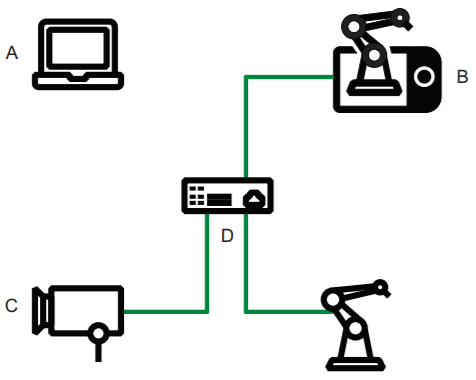
The system includes a complete software and hardware solution that is fully integrated with the ABB robot controller and the RobotStudio programming environment. The vision capability is based on the Cognex In-Sight® smart camera family, with embedded image processing and an Ethernet communication interface.
RobotStudio is equipped with a vision programming environment that exposes the full palette of Cognex EasyBuilder® functionality with robust tools for 2D part location, part inspection, and identification. The RAPID programming language is extended with dedicated instructions and error tracing for camera operation and vision guidance.
Additional options: