Voor palletiseren wordt veelvuldig gebruik gemaakt van vierassige robots. Echter hebben deze robots het nadeel dat beweging wordt beperkt door een stangenstelsel dat over de robotarm loopt. Dit nadeel hebben zesassige robots niet waardoor zij een veel groter werkbereik hebben.
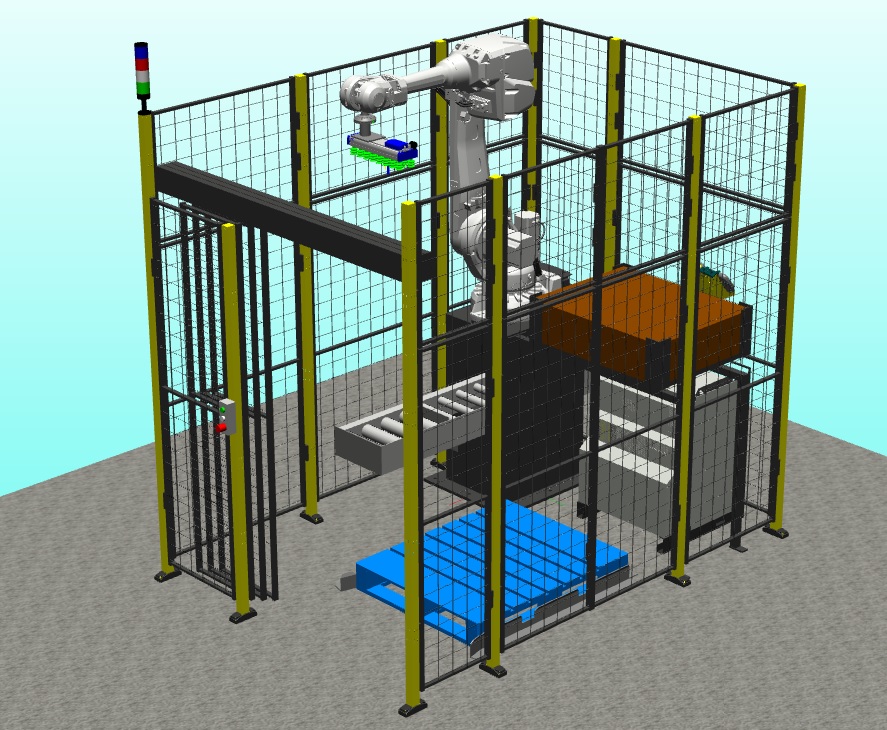
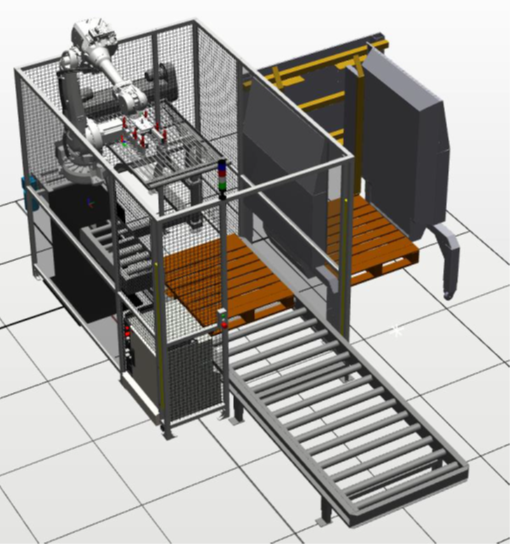
Voor de LeanPalletizer heb ik gekozen voor de zeassige ABB IRB 4600-60/2.05 robot. De robot kan 60 kg hanteren en het werkbereik is voldoende groot om pallets tot zelfs vrachtwagen hoogte, 2.400 mm, te stapelen. Een bijkomend voordeel is dat de robot diep kan reiken waardoor de robot op een ruime hoogte boven een aanvoerbaan kan worden geplaatst.
Om een zo compact mogelijke cel te realiseren heb ik de pallet waarop gestapeld wordt naast de aanvoerbaan gesitueerd. Een palletiseercel zal zo niet meer dan 2 bij 3 meter vloeroppervlak hoeven in te nemen.
Achter de pallet, naast de robot, heb ik de robotbesturing gesitueerd. Boven de robotbesturing is plaats voor een eventueel magazijn met tussenlegvellen.